8位微处理器实践(1) - 彩色LED控制器
这一篇研究怎样使用PIC控制彩色LED。
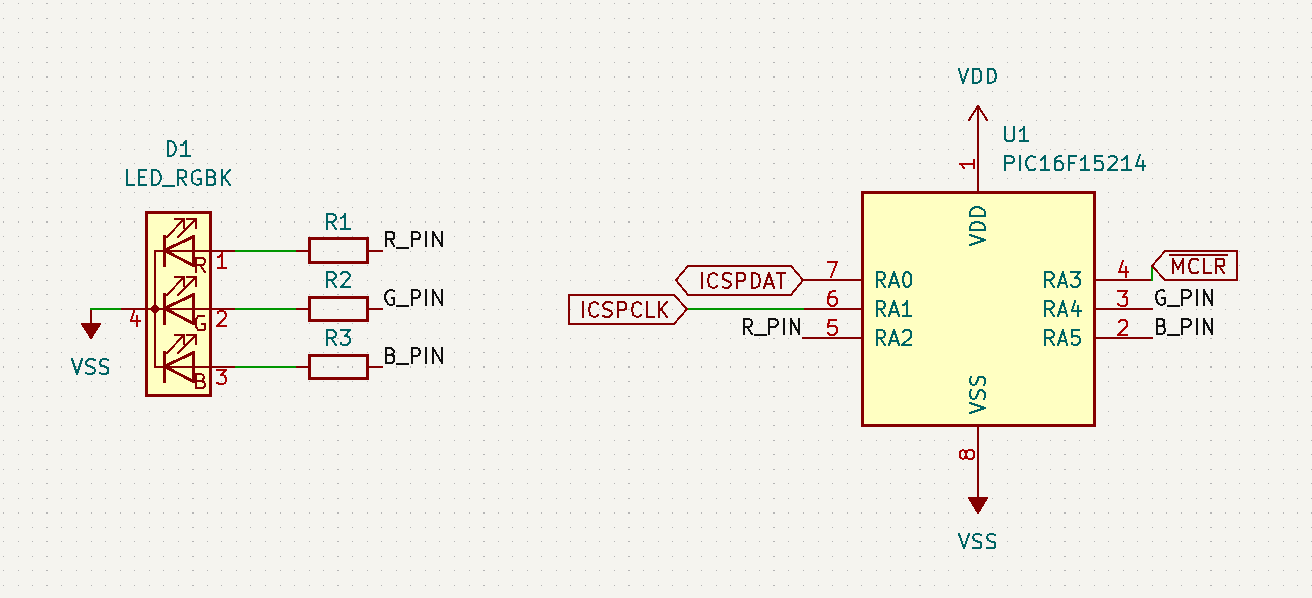
彩色LED可以使用4引脚的RGB共阴发光二极管。 阴极接Vss,RGB三个阳极经过限流电阻分别接三个GPIO引脚。PIC的GPIO可以输出25mA电流,足够直接驱动LED,无需额外的晶体管。
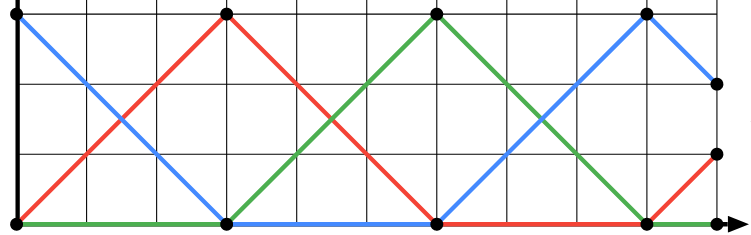
我希望实现色彩循环渐变的效果,因此我把循环周期等分为三个相位,对于某一种颜色:
- 亮度从0增加到最大
- 亮度从最大减小到0
- 亮度保持为0
红、绿、蓝三个颜色各错开一个相位,这样就可以产生各种颜色的组合。
LED亮度的控制,通常采用脉冲宽度调制(PWM)的办法:在很短的周期内,输出一段高电平(亮)和低电平(灭)。根据高电平所占时间(占空比)不同,人眼观察到的是不同的亮度。
这个项目我使用一片PIC16F15214。它有8个引脚,我使用其中3个作为输出。它有4个PWM外设,因此PWM的控制可以完全由硬件完成。
这个项目比较简单,可以用PIC汇编实现。在MPLAB X中,将编译器设为pic-as,并创建一个主文件main.S。
配置字
在汇编文件的最开头,应当设置PIC的配置字 (Configuration words)。MPLAB X提供了一个图形界面 (Production→Set Configuration Bits),当编译器是pic-as时,可以生成相应的汇编代码。当编译器是XC8时,则生成C代码。
; PIC16F15214 Configuration Bit Settings
; Assembly source line config statements
; CONFIG1
CONFIG FEXTOSC = OFF ; External Oscillator Mode Selection bits (Oscillator not enabled)
CONFIG RSTOSC = HFINTOSC_1MHZ; Power-up Default Value for COSC bits (HFINTOSC (1 MHz))
CONFIG CLKOUTEN = OFF ; Clock Out Enable bit (CLKOUT function is disabled; I/O function on RA4)
CONFIG VDDAR = HI ; VDD Range Analog Calibration Selection bit (Internal analog systems are calibrated for operation between VDD = 2.3V - 5.5V)
; CONFIG2
CONFIG MCLRE = EXTMCLR ; Master Clear Enable bit (If LVP = 0, MCLR pin is MCLR; If LVP = 1, RA3 pin function is MCLR)
CONFIG PWRTS = PWRT_OFF ; Power-up Timer Selection bits (PWRT is disabled)
CONFIG WDTE = OFF ; WDT Operating Mode bits (WDT disabled; SEN is ignored)
CONFIG BOREN = ON ; Brown-out Reset Enable bits (Brown-out Reset Enabled, SBOREN bit is ignored)
CONFIG BORV = LO ; Brown-out Reset Voltage Selection bit (Brown-out Reset Voltage (VBOR) set to 1.9V)
CONFIG PPS1WAY = ON ; PPSLOCKED One-Way Set Enable bit (The PPSLOCKED bit can be set once after an unlocking sequence is executed; once PPSLOCKED is set, all future changes to PPS registers are prevented)
CONFIG STVREN = ON ; Stack Overflow/Underflow Reset Enable bit (Stack Overflow or Underflow will cause a reset)
; CONFIG3
; CONFIG4
CONFIG BBSIZE = BB512 ; Boot Block Size Selection bits (512 words boot block size)
CONFIG BBEN = OFF ; Boot Block Enable bit (Boot Block is disabled)
CONFIG SAFEN = OFF ; SAF Enable bit (SAF is disabled)
CONFIG WRTAPP = OFF ; Application Block Write Protection bit (Application Block is not write-protected)
CONFIG WRTB = OFF ; Boot Block Write Protection bit (Boot Block is not write-protected)
CONFIG WRTC = OFF ; Configuration Registers Write Protection bit (Configuration Registers are not write-protected)
CONFIG WRTSAF = OFF ; Storage Area Flash (SAF) Write Protection bit (SAF is not write-protected)
CONFIG LVP = ON ; Low Voltage Programming Enable bit (Low Voltage programming enabled. MCLR/Vpp pin function is MCLR. MCLRE Configuration bit is ignored.)
; CONFIG5
CONFIG CP = OFF ; User Program Flash Memory Code Protection bit (User Program Flash Memory code protection is disabled)
// config statements should precede project file includes.
#include <xc.inc>
引脚映射
xc.inc包含了寄存器定义。为了程序的可读性,我自己也给一些寄存器定义别名:
R_PPS equ RA2PPS
G_PPS equ RA4PPS
B_PPS equ RA5PPS
R_PR equ CCPR1H
G_PR equ CCPR2H
B_PR equ PWM3DCH
我用RA2、RA4、RA5引脚分别控制红、绿、蓝输出,它们的PWM分别由CCP1、CCP2、PWM3控制。
psect main_code,class=CODE,delta=2
global _main
_main:
; initialize pins
banksel ANSELA
movlw 0xca
andwf ANSELA,f ; R2,R4,R5 are digital..
banksel TRISA
andwf TRISA,f ; ..output pins
banksel R_PPS ; Output PPS regs are in the same bank
movlw 1
movwf R_PPS ; R_PIN uses CCP1
movlw 2
movwf G_PPS ; G_PIN uses CCP2
movlw 3
movwf B_PPS ; B_PIN uses PWM3
在pic-as中,所有汇编代码必须指定其所在的程度段 (psect)。链接程序 (linker) 将为这些 psect 分配地址。这和MPASM不同,MPASM里所有代码都使用绝对地址。使用psect的好处是方便整合C和汇编代码,但也给写纯汇编代码增添了一些麻烦。
初始化
设置好引脚后,下一步是初始化定时器和PWM。
; initialize timer2 - PWM clock source
banksel T2CON
movlw 5
movwf T2CLKCON ; TMR2 uses MFINTOSC - 500kHz
movlw 0x00 ; PSYNC=0,CPOL=0,CSYNC=0,MODE=0 (normal timer)
movwf T2HLT
movlw 255
movwf T2PR ; period = 256 clock period
movlw 0x90
movwf T2CON ; ON, 1:2 prescaler, 1:1 postscaler
; PWM frequency is about 977Hz
; initialize PWMs
banksel CCP1CON
movlw 0x9c
movwf CCP1CON ; EN, FMT=1 (left aligned), MODE=PWM
movwf CCP2CON ; same
movlw 0x80
movwf PWM3CON ; EN, POL=normal
这些设置比较枯燥,需要参考厂商发布的数据表 (datasheet)。如果用C开发,那么也可以用Microchip提供的代码生成器MCC (Microchip Code Configurator)。
这里结果是把Timer2设置为大约1kHz的定时器作为PWM的时钟。占空比由x_PR/T2PR确定。简单地说,要控制亮度,只需要写一个0-255的数值进x_PR寄存器,而无需担心PWM波形是怎么生成的——硬件PWM模块负责这一部分。
PIC汇编的一个缺点是访问寄存器之前必须选择正确的内存bank。如果遗漏了这个指令(手写汇编时很容易发生),那么访问的是别的寄存器,代码也就无法正常工作。
主程序
主程序相对来说比较直接,就是上文描述的三个相位:
; initialize RGB output
banksel R_PR
movlw 255
movwf R_PR
clrf G_PR
clrf B_PR
; mainloop
phase_A: ; R\ G/ B_
call delay
incf G_PR
decfsz R_PR
goto phase_A
phase_B: ; R_ G\ B/
call delay
incf B_PR
decfsz G_PR
goto phase_B
phase_C: ; R/ G_ B\.
call delay
incf R_PR
decfsz B_PR
goto phase_C
goto phase_A
delay是一个延时程序,可以控制颜色变化的速度。可以用一个简单的计数器循环实现,代码我就省略不写了。
重置向量
用C开发时,main函数是程序的入口。实际上,重置向量 (reset vector) 才是真正的入口——这是微控制器在通电时或者重置时跳转到的地址。在PIC上,重置向量是0x0,并且只能放4条指令(因为0x4是中断向量)。所以,一般在重置向量的位置只放跳转指令,跳转到真正的入口。C编译器在幕后做了这些事情,而用汇编的时候则需要自己手动做。
psect resetVec,class=CODE,delta=2
_resetVec:
pagesel _main
goto _main
在MPLAB X中,需要手动添加链接器选项-presetVec=0h,告诉链接器把这个psect放在这个地址。